总部电话:010-62932100
销售热线:010-62927938
总部地址:北京市海淀区学清路9号汇智大厦A座10层
公司邮箱:info@syn-tron.com



本方案应用于北京航空航天大学科研项目半物理仿真验证试验及测试,可模拟三个平动自由度和三个转动自由度的运动。系统由机械台体、电控系统、主仿真机组成,采用数字化伺服驱动和网络化等系统技术,实现机械台体的偏航、俯仰、滚转、纵向、横向、垂向六自由度精确控制。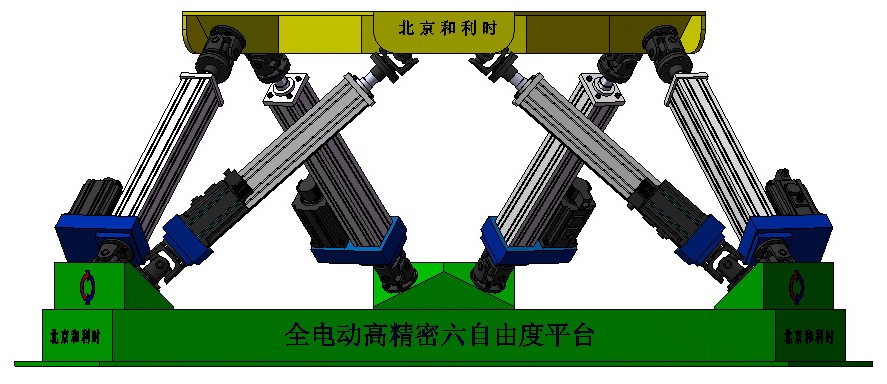
电控系统组成
多自由度运动平台电控系统由网络化伺服电机驱动器和MBOX通讯控制板卡组成,运用CAN总线和以太网总线技术,实现设备的多平台、多自由度、高速度、大容量的运行控制。
上图是网络化伺服驱动系统通过CAN总线和MBOX通讯控制器构成网络化伺服控制系统的典型构架。MBOX与上位计算机之间通过交换机实现以太网的通讯,MBOX与伺服驱动器之间实现CAN总线的通讯。MBOX还可以与本地计算机或触摸屏实现基于通过RS232等接口的MODBUS通讯,便于监控和调试。同时, MBOX还提供8路数字输入,12路数字输出及2路模拟量输出接口,便于通过以太网总线实现低成本的数字及模拟接口数据采集和控制。
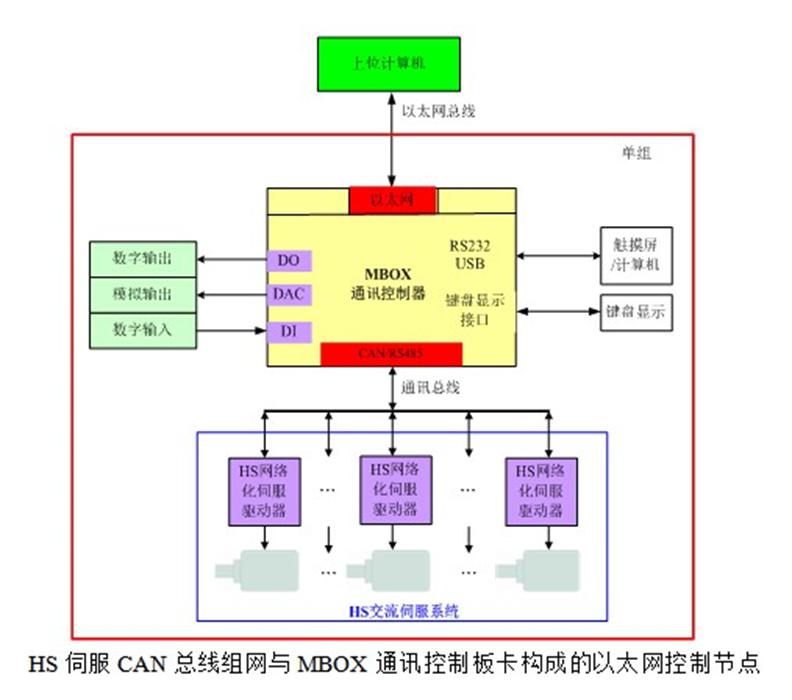
图2 HS伺服CAN总线组网与MBOX通讯控制卡构成图
2.2 电控系统功能特点
(1)网络化伺服驱动系统
网络化伺服驱动系统采用TI的32位含浮点运算能力的双核数字信号处理芯片,采用全新的伺服控制算法,对永磁同步伺服电机的位置、速度、加速度和输出转矩进行精确控制。通用运动控制功能: 位置/速度/力拒控制, 模式切换;
快速的电流环浮点CLA内核处理,具有良好的动态跟随性;
内置电网电压补偿控制,自动适应电网电压的波动;
内置2路可选共振低通滤波,以及2级共振陷波滤波器,有效应对机械共振;
内置专有智能再生制动控制技术;
内置转矩观测器技术,自动适应负载的变化;
控制增益可切换或内部自适应匹配;
内置动态制动控制,为驱动提供额外的安全防护;
具有过载自动降载算法,可参数化选择是否过载保护,以及参数化设置自动平滑降载及恢复过载能力;
支持MODBUS协议的 RS232及RS485通讯接口,直接与上位机和触摸屏等通讯;
支持CAN总线接口,内置专有通讯协议,方便客户定制使用;
控制端口支持软件方式分配、逻辑设置、可编程滤波,使用灵活方便可靠;
脉冲模拟量接口, 脉冲输入频率最高可达1MHZ;
2路模拟量输出可观测驱动器内部状态,方便现场调试;
内置功率器件温度监控和过流,过压以及过热等保护,确保可靠驱动;
具有历史故障记录等可靠性管理功能。
(2)MBOX通讯控制器
MBOX是一款专为伺服网络化控制应用开发的一款以太网到CAN总线的双向数据传递的,含有RS232或RS422,12路数字输出,2路模拟输出,8路数字输入等信号接口的多功能应用板卡。其中的CAN总线采用了电气隔离技术,确保总线驱动的可靠与安全。
(3)HS伺服驱动系统与MBOX通讯控制板卡构成的网络化控制系统
网络化伺服驱动系统,提供了3种总线接口,包括RS232,RS485以及CAN总线。其中RS232接口是标准配置的通讯接口,RS485和CAN总线是选配的通讯接口,采用了电气隔离及瞬态电压抑制保护技术,具有良好的电磁兼容性和可靠性。
标准配置的RS232接口实现网络化伺服驱动系统与上位机或触摸屏的点到点通讯,可实现对伺服驱动系统的状态监视、参数读写以及总线模式的控制,当用户要求网络化伺服驱动系统组网运行时,可选择RS485总线或CAN总线。
网络化伺服驱动系统加强了总线模式下的控制功能,支持RS232,RS485以及CAN总线接口的多种总线模式控制,包括:
总线接口的转矩模式控制
总线接口的转速模式控制
总线接口的相对位置模式控制
总线接口的绝对位置模式控制
3、北航六自由度平台设计方案
全电动多自由度运动平台技术方案:采用电动缸和交流伺服电机及驱动器控制方案,具有响应速度快,控制精度高,使用方便,操作便捷等优点。我们从底层内核为该平台的电动缸控制实现优化,其控制响应性能及环保等要素远远超过液压控制方案。
全网络化拓扑通讯控制:通过和利时电机公司自主研发的网络化运动控制器MBOX实现以太网+CAN总线两级拓扑,通讯容量大,速度快,可扩展性好,绝对位置信号带CRC校验,可靠性高,兼顾性能和成本,远优于单一的以太网或 CAN 总线网络拓扑。
双向远程监控:上位机通过以太网连接MBOX运动控制器,MBOX运动控制器与HS 伺服驱动器进行了高度紧密的系统集成。上位机即可以控制 MBOX 的运行参数及每个自由度的伺服运行位置,还可以实时监控每个自由度的运行速度,实际位置,负载率,伺服状态字等信息。
过载自动降载及恢复技术:伺服驱动器具有智能过载自动降载及恢复技术,免除电动缸及电机的短时过载的保护导致的停机及故障麻烦。
可靠性管理技术:系统可以统计电动缸及电机的使用时间及使用寿命时间,方便进行运动平台的可靠性维护。
提供多种紧急停机处理:可以通过上位机用以太网通讯或本地数字输入开关的方式,实现动感平台的紧急停机。可以紧急停止在当前位置,当前 X,Y,Z 轴任意一轴水平或平均位置,或紧急停止在起始位置。
智能再生制动控制:用于运动平台快速回落过程中的伺服驱动器的再生能量回馈及其处理。
电网电压自动补偿: HS伺服驱动器具备电网电压补偿算法功能,自动应对电网电压的波动。
支持电磁制动和动态制动功能:HS伺服驱动器针对电源断电及故障发生情况下,支持电磁制动(抱闸)和动态制动功能,确保平台的安全停机。
人性化PC人机界面: 基于LabWindows编程环境的图形化上位机软件人机操作界面,支持点动控制,正弦控制,姿态控制等六自由度平台的常用各种操作,可随时按用户需求升级或完善上位机软件。
支持完全无限位传感器初始定位技术:利用和利时电机公司自主知识产权的HS系列伺服驱动器,可以从驱动内核来实现电动缸完全无限位传感器的初始定位技术,从而降低系统成本和故障率。
辅助调试 HMI 界面:通过MBOX用RS232接口实时监控每个自由度的运行速度,实际位置,负载率,伺服状态字等信息,便于调试以及诊断等。



总部电话:010-62932100
销售热线:010-62927938
总部地址:北京市海淀区学清路9号汇智大厦A座10层
公司邮箱:info@syn-tron.com
伺服电机 步进电机 伺服驱动器 步进驱动器 轮毂电机
版权所有:北京和利时电机技术有限公司京ICP备11028021号-1网站地图

